L'objectif du projet "Divy" est de concevoir et réaliser une plateforme sous-marine de petite taille pour procéder à des tests unitaires à moindre coût.
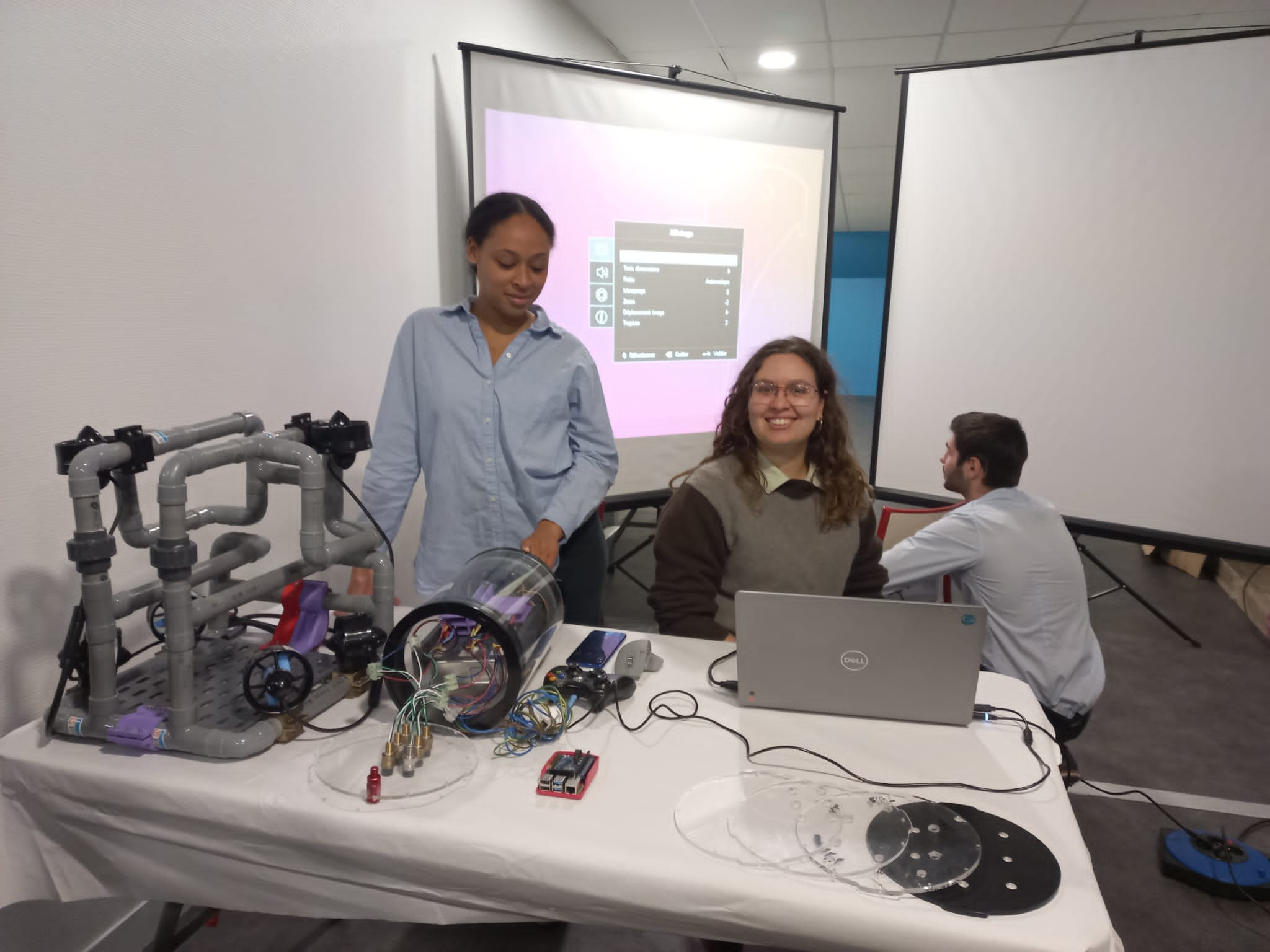
Ce projet a été confié par l'entreprise Forssea Robotics aux étudiants de la spécialité Robotique de Polytech Sorbonne dans le cadre de leur projet industriel.
En effet, cette entreprise qui conçoit et fabrique des ROVs (Remotely Operated underwater Vehicle) et des systèmes de positionnement par la vision avait besoin d'une plateforme pour réduire les coûts liés aux tests unitaires de capteurs (IMU, caméras, mesure de pression, d’humidité, etc.).
Ces coûts étant principalement dus à la logistique complexe mise en jeu lors des campagnes d'essais, leur besoin était d'avoir une plateforme qui peut être manipulée par une à deux personnes afin de réaliser des tests dans des bassins en région parisienne.
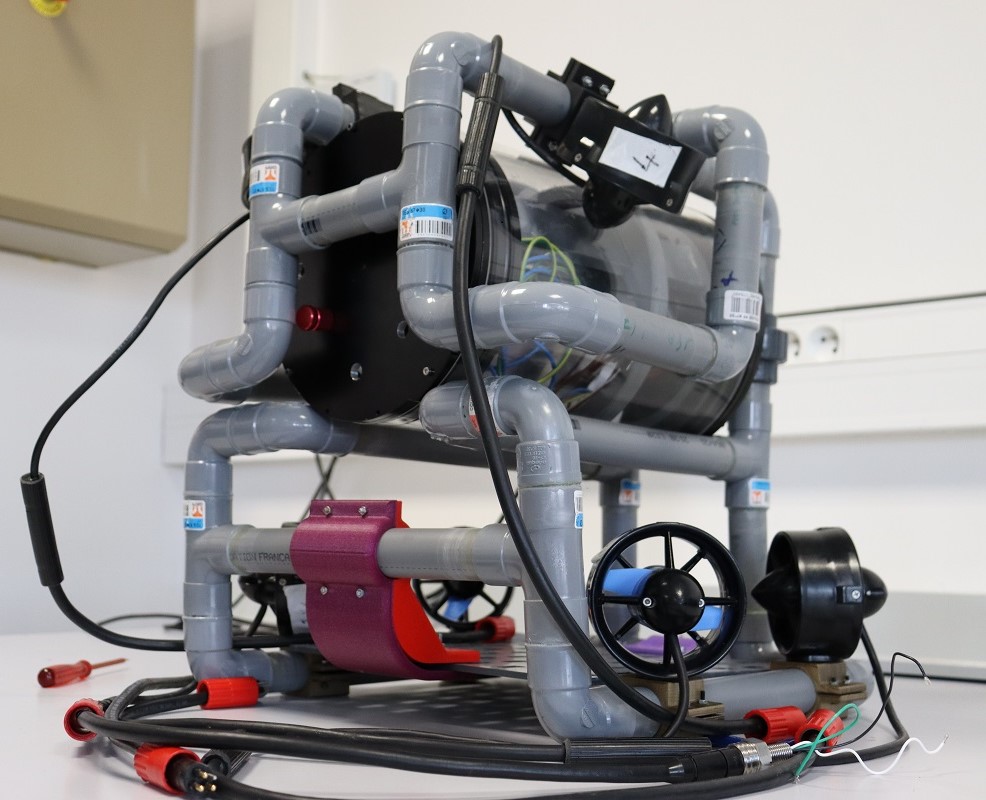
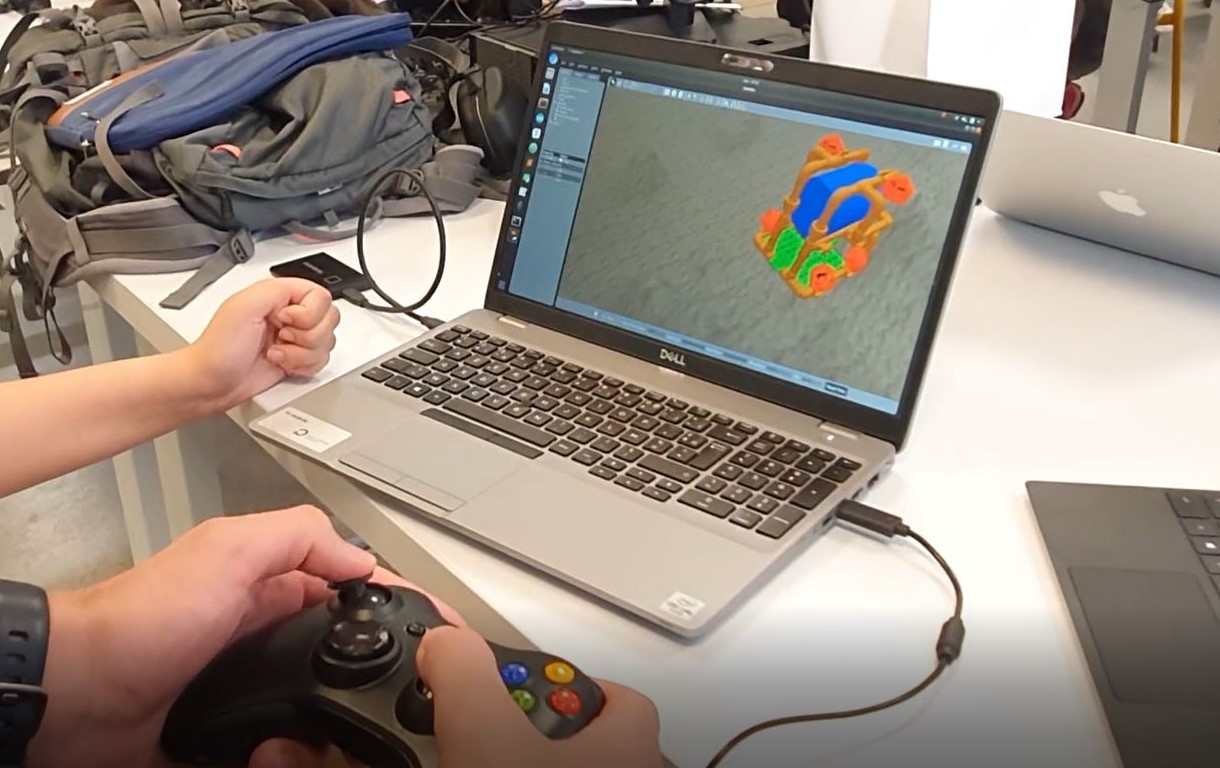
Une plateforme dont la structure légère est constituée de tuyaux en PVC a été conçue et fabriquée par les étudiants. Un simulateur a également été développé afin de tester toute l'architecture logicielle sans utiliser le dispositif physique.